Projects
FUM-Test Setup
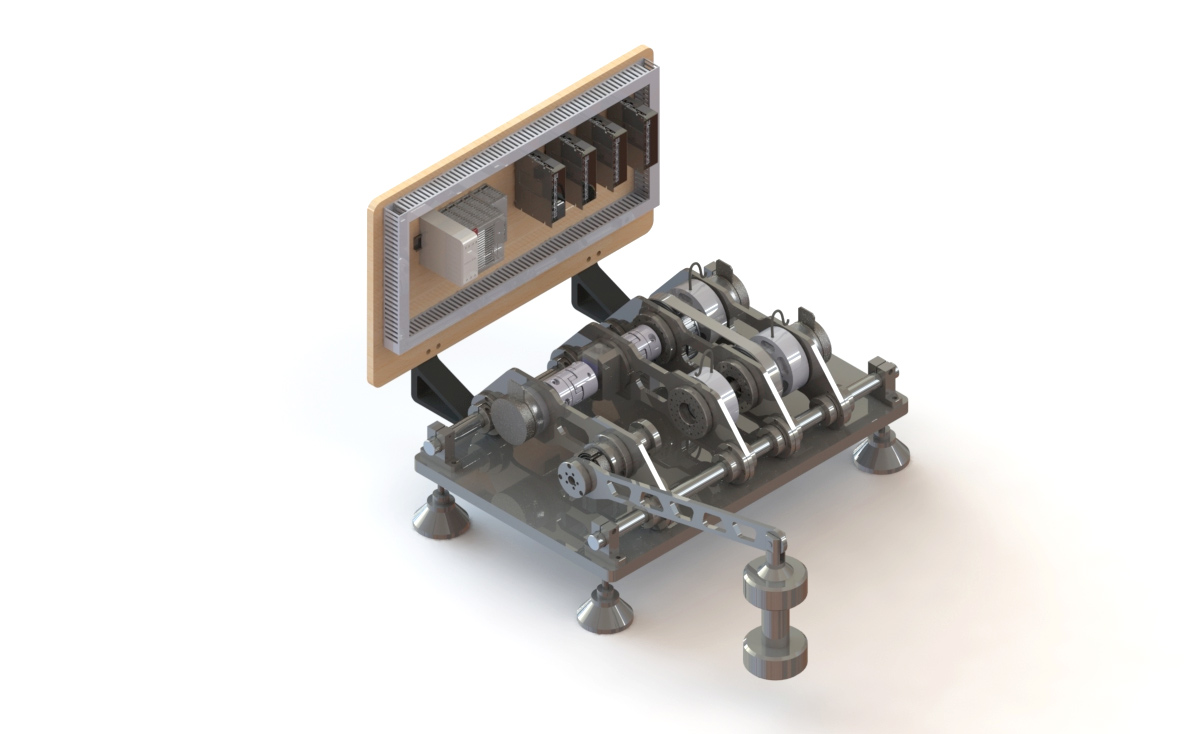
Test setup, as its name implies, is a platform for performing various tests and control scenarios. An important purpose of launching test setups is to simulate the performance of the assistive robot and implement control algorithms in a controlled environment. This device has the ability to simultaneously connect and couple 3 electric motors in a way that the first engine is operator, the second engine is the estimated of human leg load and the third engine is the assist in the scenario of simulating human movement with a wearable exoskeleton robot. At the same time, the prerequisite for performing such tests is the identification of system components. One of the challenges is identifying the non-linear power transmission of the harmonic drive gearbox. The next step is to design and implement control algorithms.
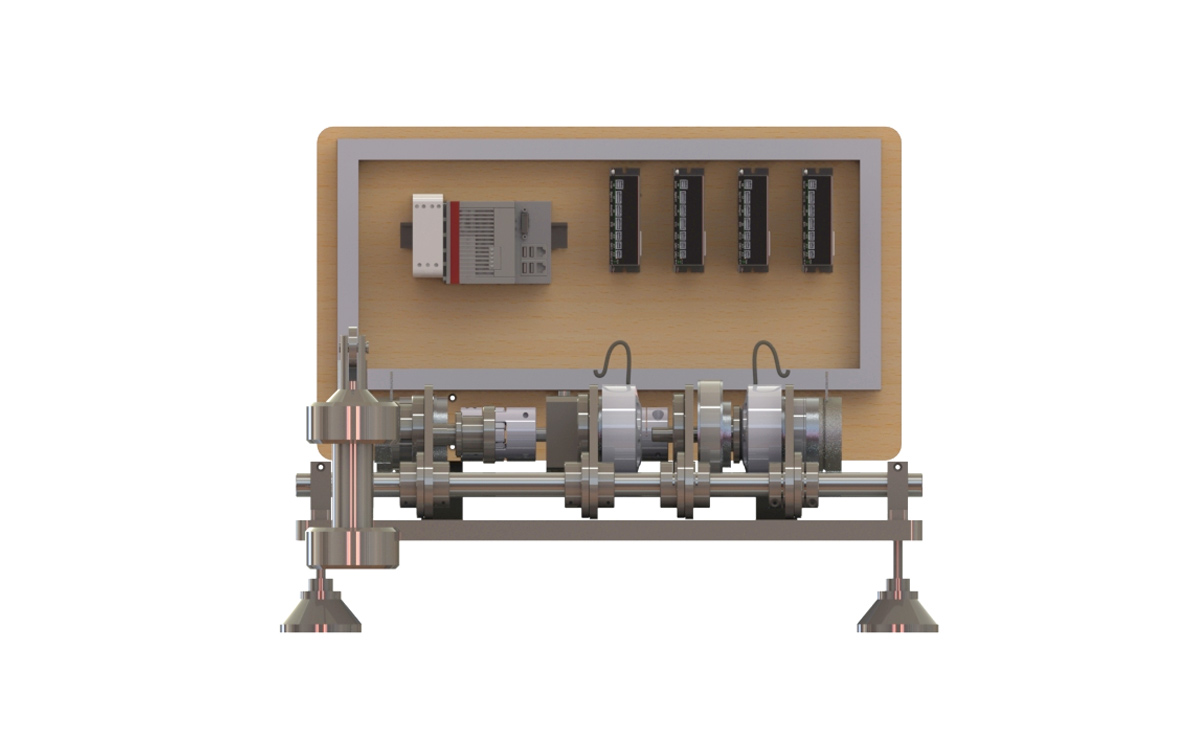
FUM-Test Setup is a simulator of different control scenarios for the exoskeleton robot. Provided the acceptable performance in the test setup environment, these control algorithms are then tested and executed on the exoskeleton worn by user in order to guarantee life and financial security. We can use FUM-Test Setup for the simulation of human joint movements, implementation of various control algorithms, identification of motor and gearbox, identification of spring parameters, identification of power transmission systems, and finally identification of series elastic actuators.