Industrial Robots
FUM-SCARA
SCARA is an acronym for Selective Compliance Articulated Robot Arm, meaning it is relatively compliant in the X-Y axis, and rigid in the Z-axis. SCARA robots are designed to mimic the action of a human arm to automate assembly or loading/unloading tasks with speed and precision. This feature allows the arm to extend into confined areas and then retract or "fold up" out of the way. This is advantageous for transferring parts from one cell to another or for loading/unloading process stations that are enclosed. The idea is to get all the benefit of a human employee at a higher speed and without fatigue. Adding one or more SCARA robots to the production line is one of the more affordable ways to increase production speed.

The SCARA configuration is unique and designed to handle a variety of material handling operations. By virtue of the SCARA's parallel-axis joint layout, the arm is slightly compliant in the X-Y direction but rigid in the Z direction, hence the term: Selective Compliant. This is advantageous for many types of assembly operations, i.e., inserting a round pin in a round hole without binding. SCARAs are generally faster than comparable Cartesian robot systems. Their single pedestal mount requires a small footprint and provides an easy, unhindered form of mounting.
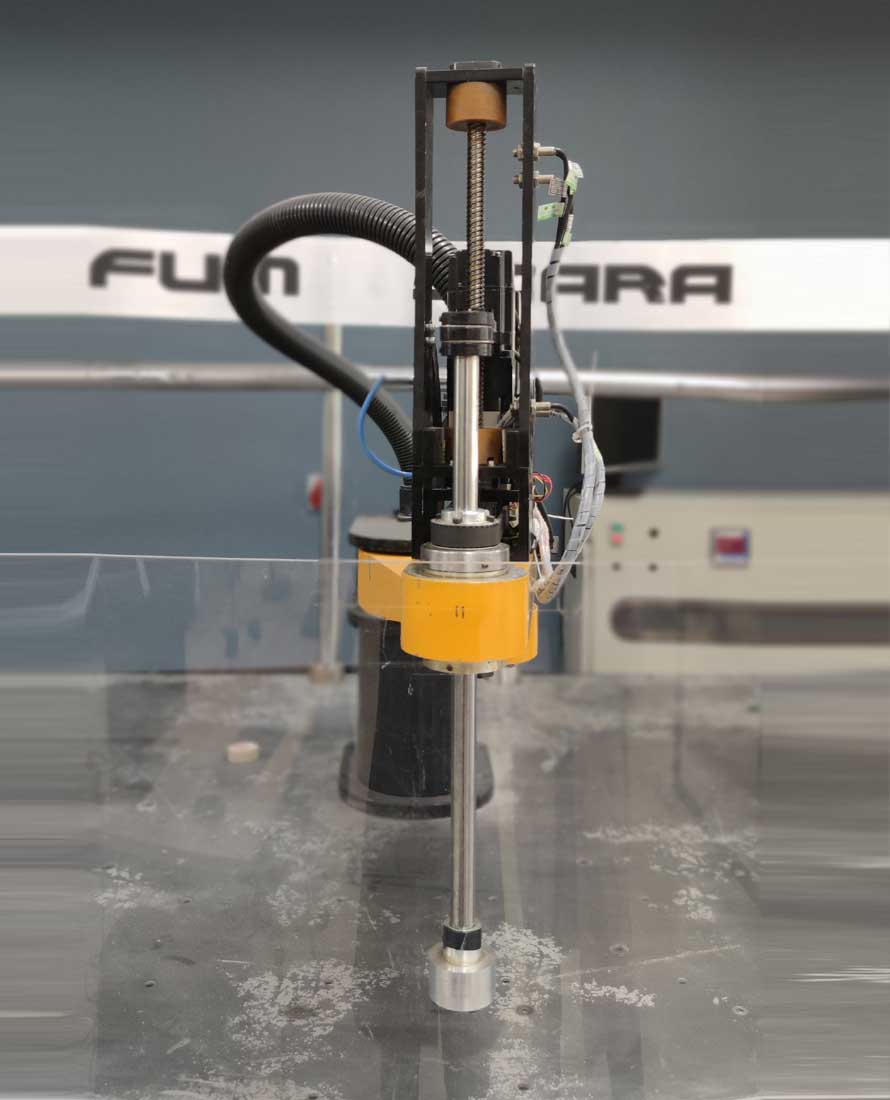
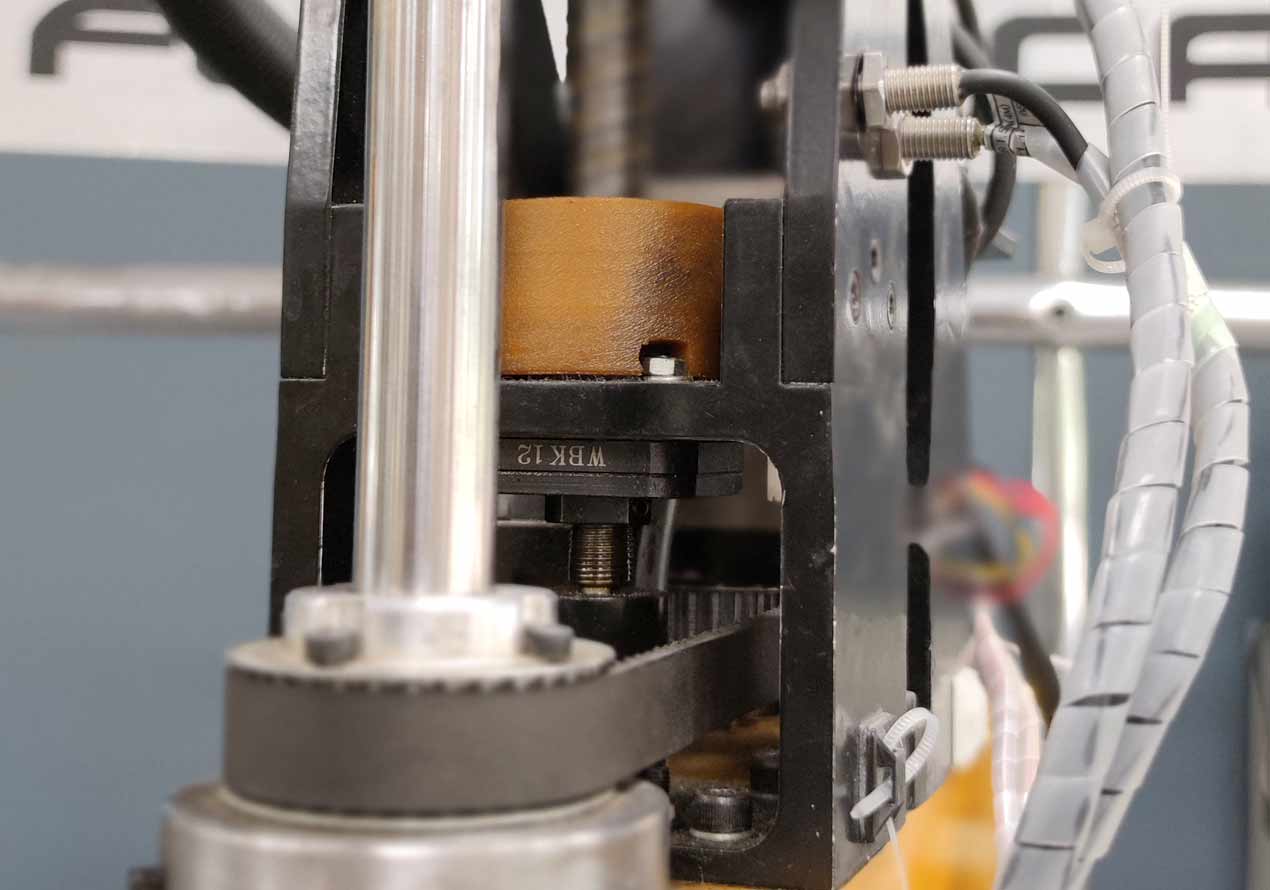
FUM-SCARA is a series RRR-P,XYZ,ϑ. Its maximum payload is 5 Kg and its maximum Cartesian speed reaches 8500 mm/s, with a repeatability of 0.15 mm/s. It is designed with an open architecture which allows easier use of research applications. This robot entails industrial grade control architecture for factory usage, with main applications in pick and place scenarios, packaging industry, and pharmaceutical lines.
FUM-New 6R

FUM-3psp

FUM-Delta

FUM-Z.W.S.S