Artificial Intelligence
FUM-Walking Agent
OpenSim is a simulation platform used to simulate rehabilitation robots, movement assistance devices, surgical robots, and analyze motion besides other applications in animation production or sports science. This software reduces the need to execute physical tests. It is in fact an open source software, and many people across the globe are involved in its development. It is one of the most useful Simbios softwares, a National Institute of Health (NIH) in Stanford University. The first version of this software was introduced in 2007, followed by more updated versions with new options.
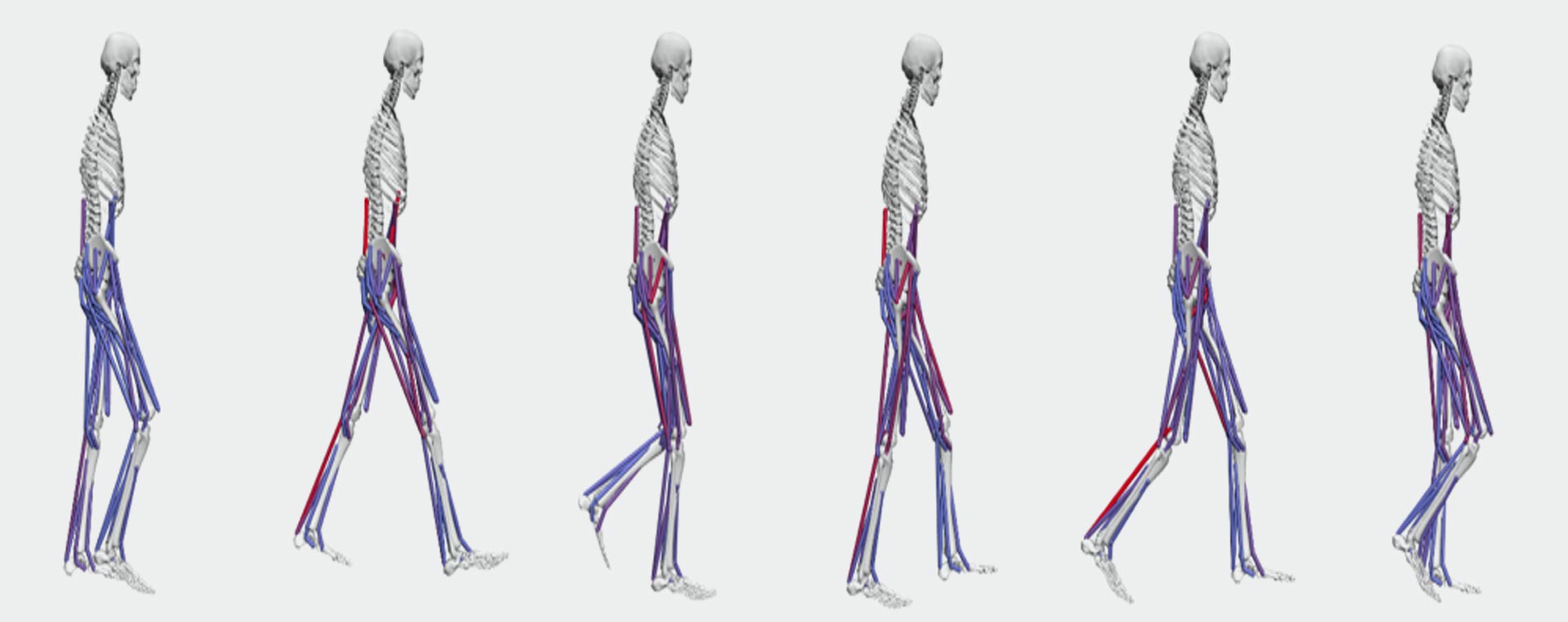
In FUM-Walking Agent project, we have used the OpenSim environment to investigate the hazardous scenarios of human rehabilitation by detecting human energy expenditure. By combining OpenSim with MATLAB and Python, a simulation-based assistive device is developed to execute a biomechanical simulation and validate the real-time assistive control system.
In fact, we tend to compute the metabolic cost of a human equipped with lower limb FUM-Exoskeletons so that a novel assistive control strategy based on the muscular energy reduction is investigated in the walking process to achieve better results in rehabilitation.
FUM-Motion Analyzer

FUM-Ping Pong