Artificial Intelligence
FUM-Ping-pong Player
As artificial intelligence is growingly entering different aspects of our modern world, human-robot interaction becomes increasingly important; for example, its application in Internet of Things (IoT) and social networks. The application of interactive agents (human-robot interaction) is also apparent in dangerous environments as they can substitute human agents. The slow speed of human processing and operation compared to intelligent systems is another important reason for doing research on and developing intelligent robots. In industrial robotics, reinforcement learning is used to achieve smooth movement of robot arm as well as optimized policy and function in complex environments with low certainty and limited data.
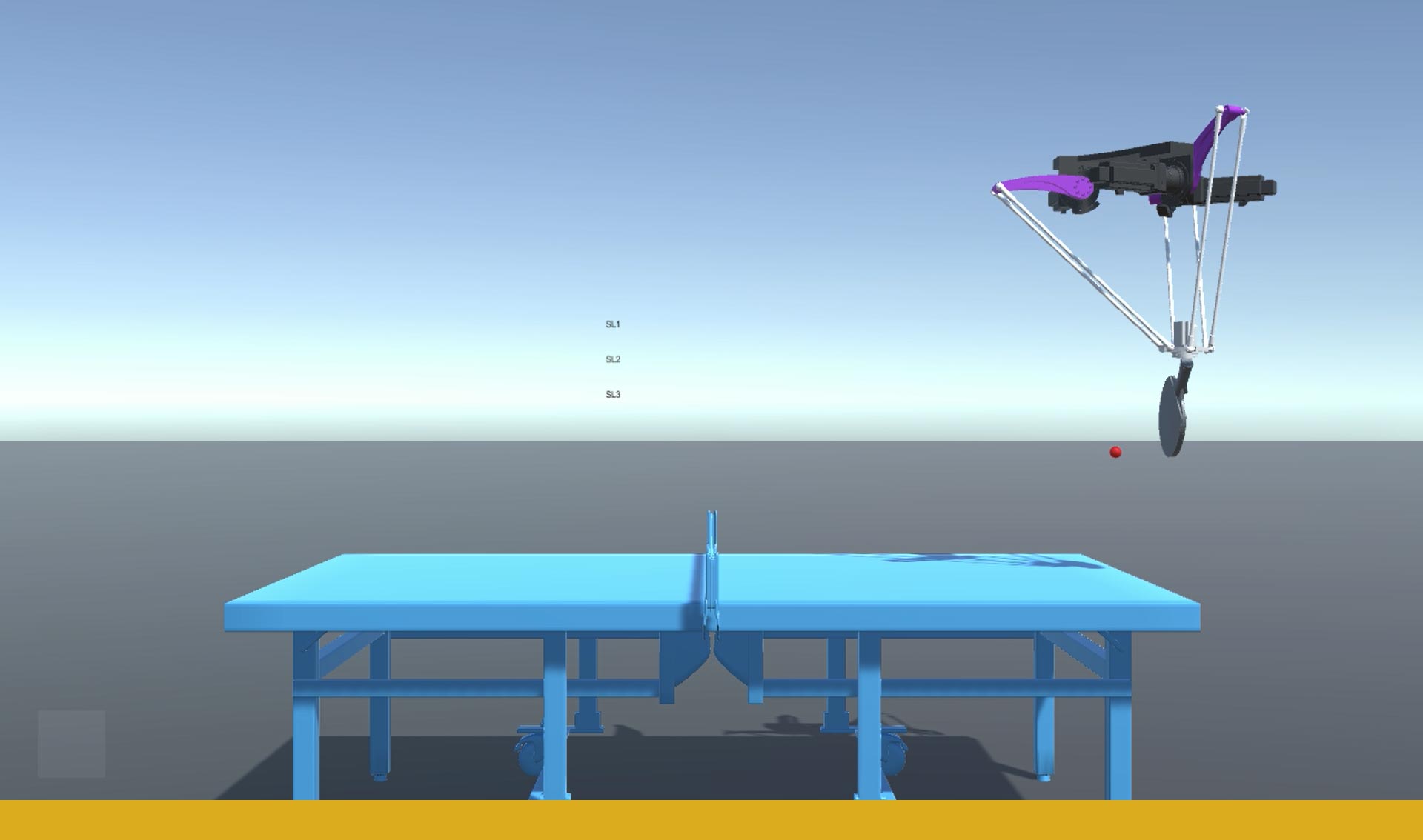
The purpose of FUM-Ping-pong Player project is the design, manufacturing, and control of FUM-Delta for playing ping-pong with a human competitor, and involves various fields including mechanical engineering, robotics, control, artificial intelligence and machine vision. For this project, we benefit from developments in machine learning as well as reinforcement learning. These approaches are mostly dependent on behaviour analysis and human logic, attempting to teach, through trial and error as well as feedback reception, an agent which can act logically in complex and uncertain environments.
The game of ping-pong is a complicated and real reinforcement learning setting in which the agent looks for an optimized policy for imitating human action and eliminate his/her shortcomings in order to constantly win against its human rival. The continuous smooth movements of robot arms, adjusting the best hitting force to the ball, and changing the ball path as desired are among important factors considered in this game. Other than these, human involvement provides a suitable interdisciplinary research area for both artificial intelligence and cognitive sciences to better analyze human behaviour and consequently human-robot interaction.
Since a ping-pong robot player needs to detect the ball path, decide spontaneously and guide the robot in situation- and time-dependent environments, there is a need for specific hardware and software. As for its hardware, we use FUM-Delta which is superior to most robots in terms of speed and acceleration. Moreover, its software accounts for spontaneous decisions in complicated and uncertain environments with limited data, similar to self-driving cars or humanoids. For example, self-driving cars use a similar system to ping-pong robot player in which the received images from cameras are processed for locating obstacles, such as vehicles or pedestrians, in order to avoid them. The advanced technology used in FUM-Ping-pong Player can therefore be easily extended to other projects.
FUM-Ping Pong

FUM-Walking Agent